マイクロビットで動く猫耳を作ろう
マイクロビットでプログラミングが学べる工作キットです。
ここでは、ボタンを押すと左右の耳がクイックイッと可愛く動くプログラムを作ります。
難易度:★★☆☆☆ 所要時間:1.5時間
Step 1: 必要なものがそろっているか確認しましょう

<セットに入っている物>
- micro:bit(マイクロビット) 1台 ※
- ワークショップモジュール 1台
- ワークショップモジュール保護パーツ 1個
- USBケーブル
- サーボモーターFS90(サーボホーンセット付) 2セット
- サーボモーターケースとネジのセット 2セット
- サーボホーン追加パーツ 2個
- サーボモーター用延長コード 2本
- カチューシャ 1個
- 結束バンド 10本程度
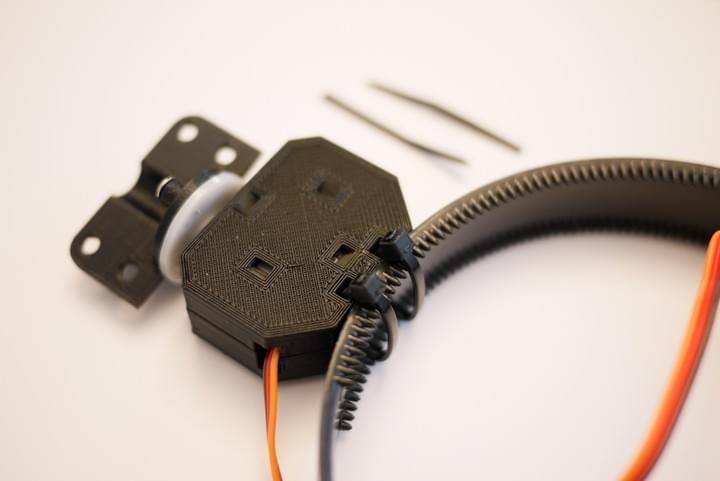
※micro:bitの色はランダムですStep 2: 本体を組み立てます

1
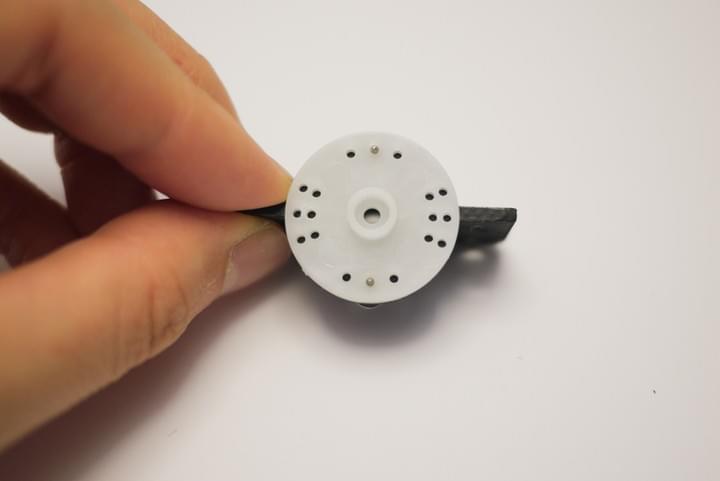
サーボモーターをサーボモーターケースにはめ込みます。ケースを開いて、写真と同じ向きになるようにサーボモーターをセットします。

2
ケースを再びはめて、ドライバーを使って2か所にネジを止めてください。同じものをもう一つ作ります。

3
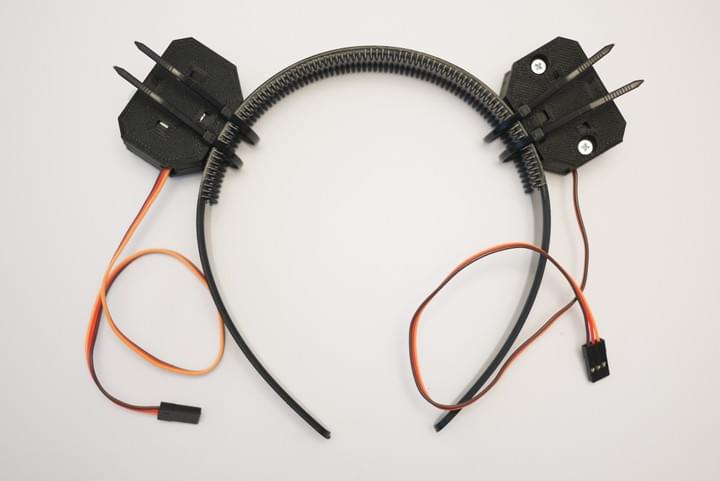
今作ったサボモーターをカチューシャに取り付けます。
サーボ―モーターをコードが外側にくるようにカチューシャにあてて、耳にする位置をおおよそ決めてください。カチューシャは頭にはめたときに広がるので、手で広げて見て位置を確認してみましょう。

4
位置を決めたらサーボモーターの穴二か所にそれぞれ結束バンドを通し、カチューシャに巻き付けて仮止めします。きつく止めてしまうとあとで位置を変えられないので注意してください。

5
もうひとつのサーボ―モータも、コードが外側にくるように位置を決めて、同じように仮止めします。写真のように、サーボモーターは左右で表裏が逆になります。

6
サーボホーンに追加パーツを取り付けます。白い丸の形のサーボホーンと細いネジ、サーボホーン追加パーツを用意し、サーボホーンと追加パーツの丸い部分を合わせ、二か所をネジで止めてください。もうひとつも同じように作ります。

7
この時、サーボホーンの白い丸の出っ張り部分が外側にくるように合わせてください。また、サーボホーンのネジ穴は白い点が三つ並んだ穴の真ん中の穴になるようにする(写真参考)。

8
サーボモーターの白い突起部分に、7で作ったサーボホーンを取り付けます。この時、サーボホーンがなるべくカチューシャと平行になるように取り付けてください。

9
位置が決まったらサーボホーンの中心にあるネジ穴一か所を止めてください。もうひとつも同じように作ります。

10
カチューシャに取り付けたサーボモータのコードに、延長コードをつなぎます。黒いコネクター同士をつなぎますが、コードの色が同じ並びになるように注意してください。

11
次に延長コードのもう片方のコネクターをモジュールにつなげます。この時も色の並びが同じになるように注意してください。
※モジュールの接続部分に「P0」「P8」と書かれています。これは、サーボモーターを動かすための、micro:bitの使用ピン番号を表しています。プログラミングする際に必要な情報なので、覚えておいてください。

12
モジュールに、猫の形の保護パーツを取り付けます。モジュールの上の二か所のネジ穴と、保護パーツの穴を合わせ、裏側からネジの足にボルトをあててネジ止めしてください。

このように合わせます。

13
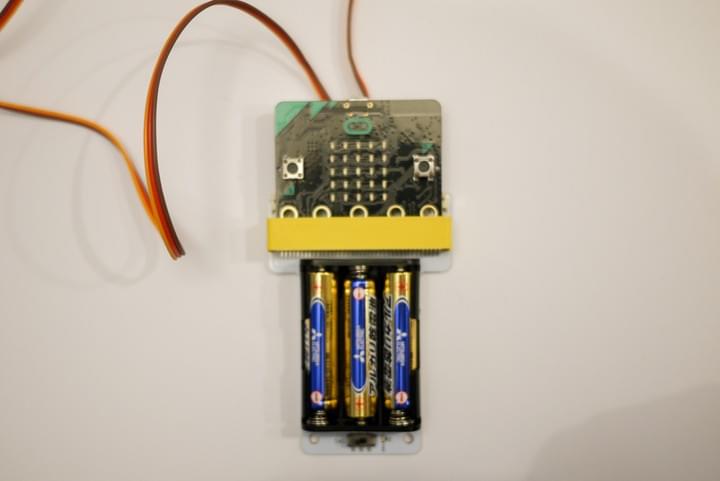
電池を入れます。電池にはプラス(+)とマイナス(-)の向きがあるので注意してください。
Step 3: パソコンとmicro:bitをつなぎます

1
パソコンでmicro:bitにプログラミングするための準備をします。パソコンを起動し、USBケーブルでmicro:bitをつないでください。

2
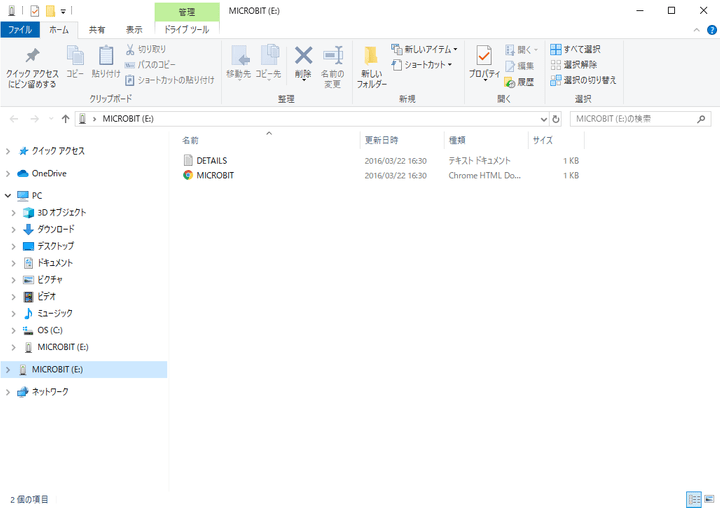
パソコンのフォルダを開いて「MICROBIT」という名前のフォルダが新しく見えていることを確認してください。
フォルダが見つからない場合は、お家の人に見てもらいましょう。それでもわからない場合は、一度USBケーブルをパソコンから外し、もう一度つないでください。
Step 4: プログラミングをしてみましょう

1
「MakeCode Editor(メイクコードエディター)」を立ち上げます。これは、micro:bitのプログラミングを行うアプリケーションのようなものです。
ブラウザでhttps://makecode.microbit.org/#lang=ja にアクセスして「+新しいプロジェクト」をクリックしましょう。

2
これが「MakeCode Editor」です。シミュレーター、ツールボックス、プログラミングエリアの3つの機能で構成されています。
- シミュレーター:プログラミングエリアで組み立てたプログラムの動きを再現する場所です。micro:bitが思った通りに動くかどうかを確認できます。
- ツールボックス:プログラミングで使うブロックが入っている場所です。機能別に整理されています。
- プログラミングエリア:プログラミングする場所です。ツールボックスからブロックをドラッグアンドドロップしてきて、ここで組み立てます。

3
ここでは、micro:bitのAボタンが押されたら片方のサーボモーターが60度動いて1秒経ったら元に戻る、Bボタンを押すともう片方のサーボモーターが60度動いて1秒後に元に戻るプログラムを作っていきます。
表示されている「最初だけ」と「ずっと」の基本ブロックは、今回は使いません。ツールボックスの中に片づけておきましょう。片づけたいブロックをツールボックスにドラッグアンドドロップしてくると消えます。

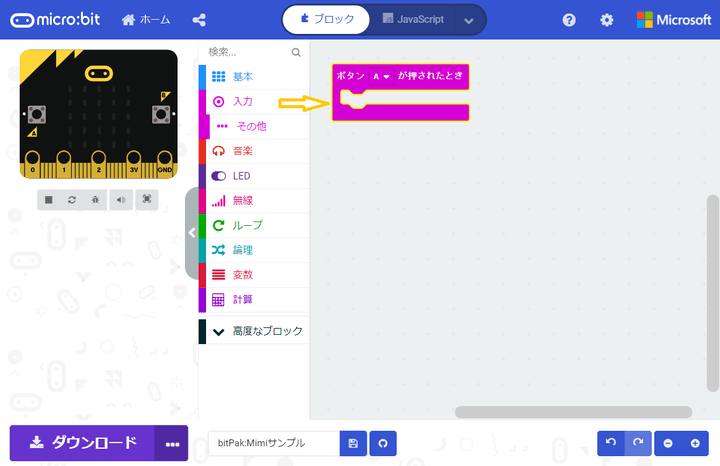
4
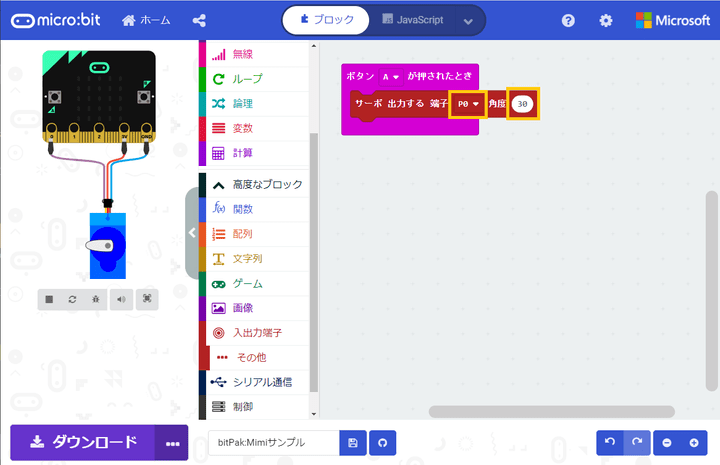
ツールボックスの「入力」の中から、「ボタンAが押されたとき」のブロックを取り出して、ドラッグアンドドロップでプログラミングエリアに持ってきます。

5
次に、「高度なブロック」をクリックし「入出力端子」の中にある「サーボを出力する」ブロックを取り出してください。ドラッグアンドドロップで、「ボタンAが押されたとき」のブロックの中に入れます。カチッと音がしてブロック同士が繋がったらOKです。

6
サーボモーターのコードを接続の際に、micro:bitの使用ピン番号について触れたのを思い出してください。「P0」と「P8」端子につなぎましたね。ここでは「P0」を指定します。角度は、90度を基準に60度動くようにしましょう。90度の位置からマイナス60度動くので、「30」度を指定します。

7
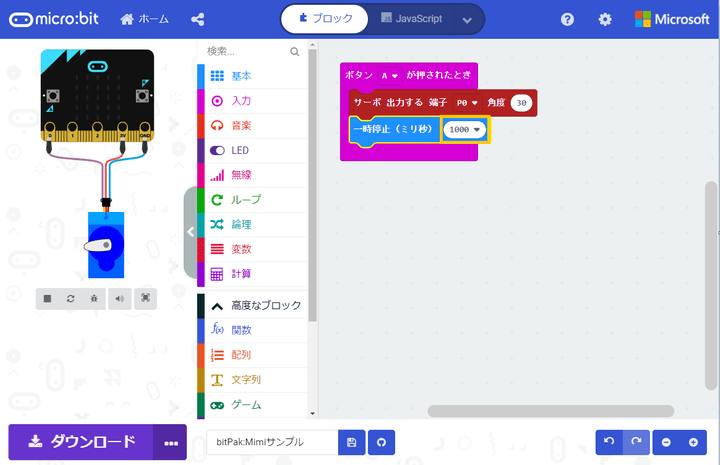
基本ブロックの中から「一時停止」のブロックを取り出してつなげてください。ここでは「1秒経ったら」を命令したいので、値は1秒 = 1000ミリ秒の「1000」を指定してください。

8
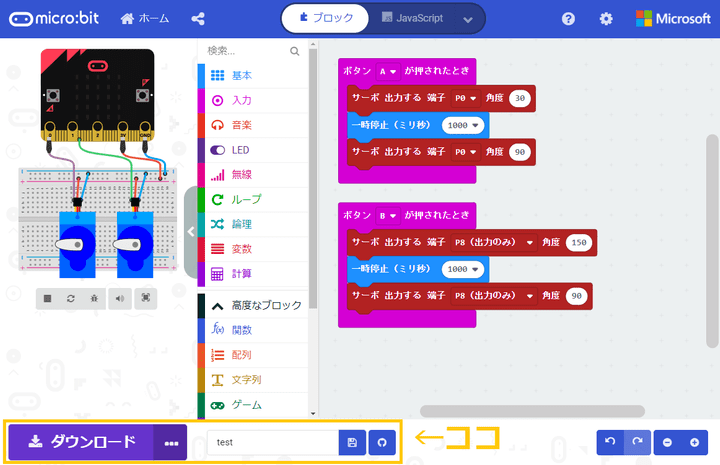
その後サーボモーターをもとの位置に戻すので、再度「サーボを出力する」ブロックを取り出すか、または5で取り出したブロックを複製してください。端子は「P0」、角度は基準値の「90」度を指定して下さい。これで片方(P0側)のサーボモーターのプログラムが完成です。

9
同じようにもう一つのサーボモーターを動かすプログラムを作ります。さっき組んだ「ボタンAが押されたとき」のブロックを右クリックで複製すると、組み合わせているブロック全てをコピーできます。ボタンを「B」に変更し、端子は「P8(出力のみ)」を指定してください。
注意したいのが角度です。左右対称に動かすには、Aボタンのサーボモーターとは逆の条件を指定する必要があります。基準値の90度から、プラス60度動かすので、「150」度を指定します。そしてAボタン同様に「1000」ミリ秒の一時停止後、また「90」度に戻します。これで全てのプログラムが完成です!
10
作り方の実演をしている動画もあります。よかったら参考にしてみてください。右の動画で、6:30くらいからプログラミングについて説明しています。(耳の工作部分はここで紹介するものとは違いますので、ご注意ください。)
Step 5: micro:bitにプログラムを書き込みます
利用するウェブブラウザによって、作業の流れが少し異なります。ここでは、Edgeを使った場合の方法を紹介します。

1
エディターの左下に「ダウンロード」ボタンがあります。その右側に、「題名未設定」と書かれた白い枠があるので、わかりやすい名前をつけてください。これがこのプログラムのファイルの名前です。ここでは仮にtestとしておきます。

画面下に写真のような表示がでてくるので、「保存」をクリックしてください。

2
ダウンロードしたファイル(microbit-test.hex)を「MICROBIT」フォルダにドラッグアンドドロップします。

3
これでプログラムの書き込みが完了です。
※Windows10専用アプリの場合:エディターの左下にある「ダウンロード」ボタンをクリックするだけで、自動的にmicro:bitにプログラムが書き込まれます。

4
micro:bitをUSBケーブルから取り外し、本体モジュールに差し込んで、下部のスイッチをONにしてください。ボタンを押して、プログラミングしたとおりに、耳のサーボモーターが動くかどうか確認してください。
Step 6: 耳部分の紙工作をします

1
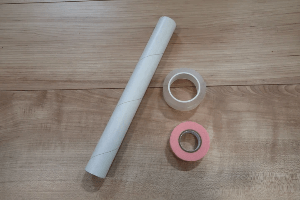
最終Stepは耳部分の紙工作です。自分で用意するものの中にあった以下のものを使います。
- 型紙(耳外側部分・耳内側部分)
- 色画用紙 2色
- ホッチキス
- はさみ
- 厚紙
- 両面テープ

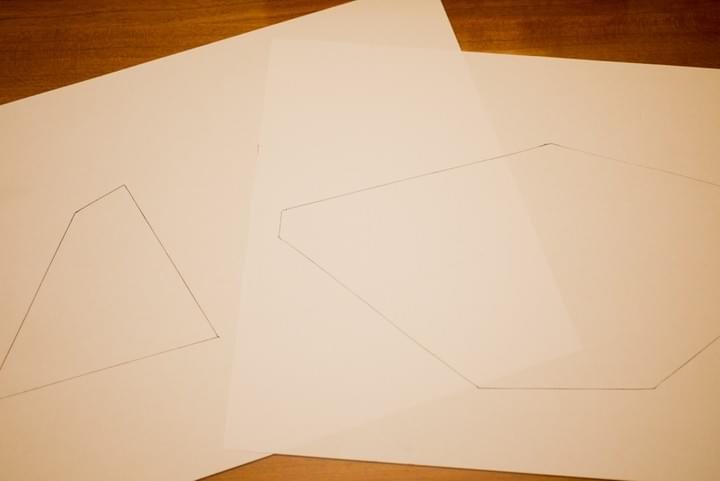
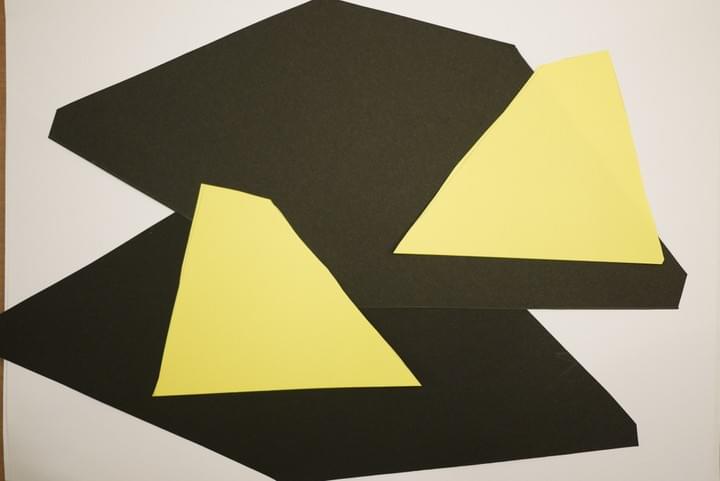
3
型紙を使って、色画用紙を同じ形に切り取ってください。写真では外耳を黒色の画用紙、内耳を黄色の画用紙で作製しています。左右で2セット必要です。

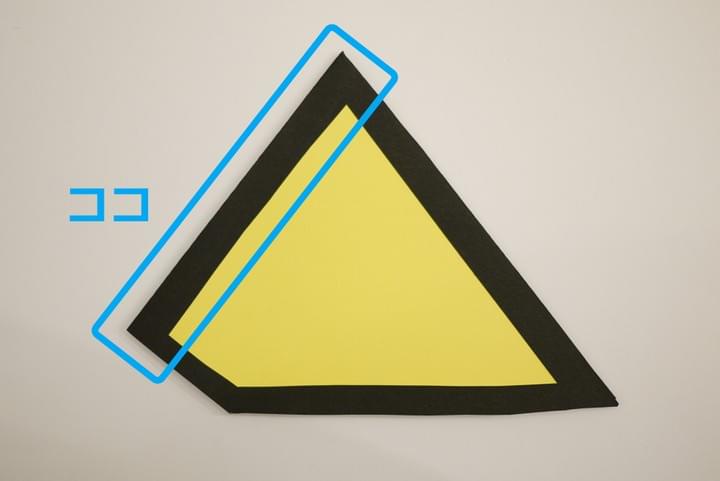
4
図示しているとおり、外耳を半分に折り、重なっている点線の部分を張り合わせます。両面テープでしっかり貼り付けましょう。

5
次に、内耳を貼ります。内耳は外耳より一回り小さいサイズになっているので、外耳のちょうど真ん中に来るように、両面テープで貼り付けます。左右対称(向きが逆)になるので注意してください。

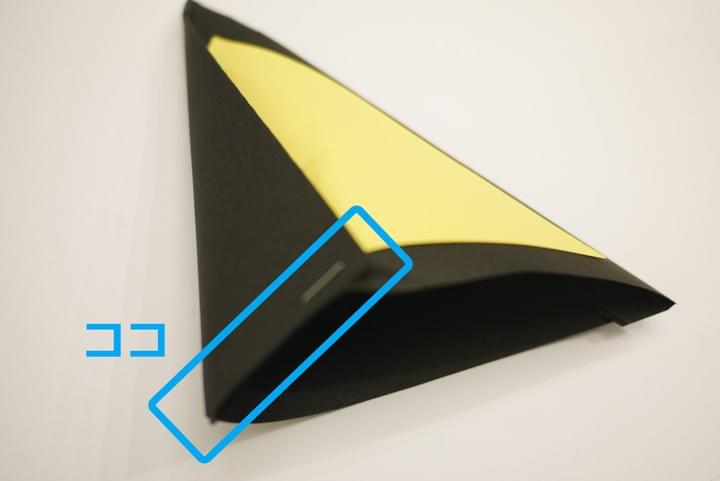
6
5の写真の左下部分をくるっと折り返してください。図示しているとおり、点線の部分をホッチキスで止め、中を広げて袋状にします。

7
サーボモーターが空回りするのを防ぐための紙を取り付けます。厚紙を用意し、図示しているように、耳より一回り小さいサイズに切って、両面テープでサーボホーン追加パーツに貼り付けます。

8
厚紙とサーボモーターを覆うように耳を取り付けます。カチューシャを頭に着けて、耳の位置を調整してください。

9
耳の位置が決まったら耳を一度取り外し、サーボモーターを固定します。仮止めしていた結束バンドをきつく締めて、余分な部分をニッパーで切ってください。

10
そしてもう一度耳を取り付ければ完成です!micro:bitのボタンを押して、耳を動かしてみましょう。そして動かす角度や時間を変えて、オリジナルの猫耳を作ってみてください。
おまけ